

Relevante Energieformen
| Endenergieform | Nutzenergieform | Nebenenergieform(en) |
| Elektrische Energie | Mechanische Energie | Wärme |
Kurzbeschreibung
Im Gegensatz zu Synchron- und Asynchronmotoren erzeugen Reluktanzmotoren das Drehmoment rein aus der Reluktanzkraft. Dies entsteht durch das Bestreben des Systems nach dem minimalen magnetischen Widerstand (Reluktanz). Wie im rechten Bild zu sehen ist, liegen nicht alle Rotorzähne über allen Statorzähnen. Durch Zuschalten verschiedener Wicklungen entstehen geschlossene magnetische Kreise, die immer dann die geringste Induktivität / Reluktanz haben, wenn die betreffenden Statorzähne über den am nächsten liegenden Rotorzähnen stehen. Durch den ständigen Wechsel der Bestromung kann so ein Drehmoment bzw. eine Drehbewegung erzeugt werden.
Funktionsskizze
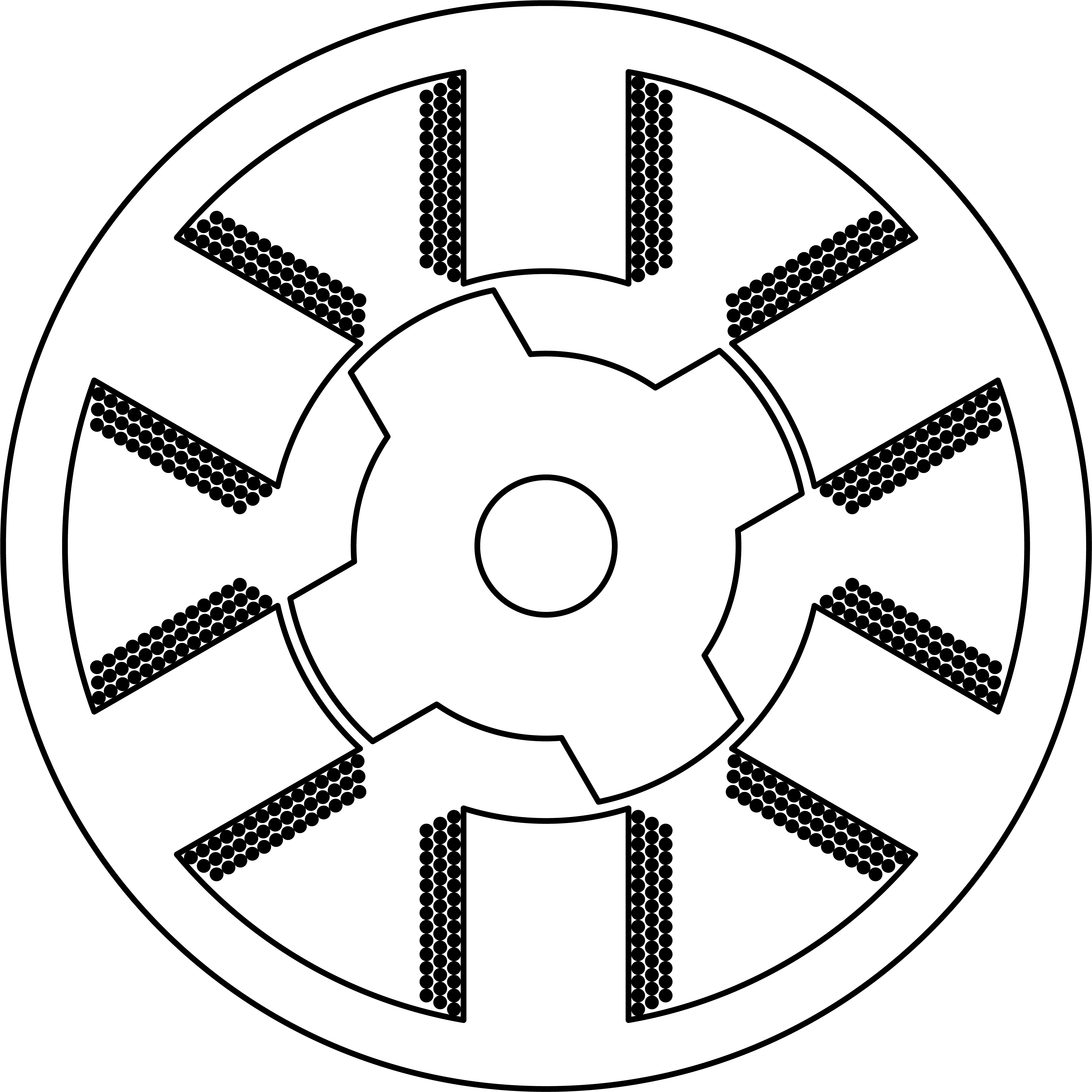
Ansicht Stator-Rotor
Berechnung des Umwandlungswirkungsgrades, typische Werte
Wirkungsgrad im Motorbetrieb:
![\[\eta = \frac{{{E_{mech}}}}{{{E_{el}}}}\]](https://technologiematrix.synergie-projekt.de/wp-content/ql-cache/quicklatex.com-07e50ce6cc648830dbf9c5f286d777c5_l3.png "Rendered by QuickLaTeX.com")
Wirkungsgrad im Generatorbetrieb:
![\[\eta = \frac{{{E_{el}}}}{{{E_{mech}}}}\]](https://technologiematrix.synergie-projekt.de/wp-content/ql-cache/quicklatex.com-17b2ec62a7f4cce7716b7f0a9b47f2ef_l3.png "Rendered by QuickLaTeX.com")
Der Wirkungsgrad ergibt sich aus dem Quotienten der abgegebenen und zugeführten Leistung. Die Differenz ist die Verlustleitung.
Die Verlustleistung ergibt sich zum größten Teil aus den Kupferverlusten des Stators für n Phasen mit dem Widerstand  und dem effektiven Phasenstrom
und dem effektiven Phasenstrom  :
:
 .
.
Die Rotorverluste ergeben sich im äquivalenten Ersatzschaltbild aus den quadrierten induzierten Strömen mal dem äquivalenten Rotorwiderstand.
![\[{P_{vr}} = RI_{rotor,eff}^2\]](https://technologiematrix.synergie-projekt.de/wp-content/ql-cache/quicklatex.com-7497993b123a600fdcd341c021751c85_l3.png "Rendered by QuickLaTeX.com")
Eisenverluste im Stator und Rotor können über die Steinmetzgleichung angenähert werden und sind sehr stark vom Herstellungsverfahren und der Geometrie abhängig.
![\[{P_{ve}} = k{B^\alpha }{f^\beta }\]](https://technologiematrix.synergie-projekt.de/wp-content/ql-cache/quicklatex.com-a2066b1ad5a1a2ae4f466df19e5d1a3f_l3.png "Rendered by QuickLaTeX.com")
(Fischer 2006)
Typischerweise: 50- 98 %
Der Wirkungsgrad ist abhängig vom Arbeitspunkt und meistens etwas größer als von Asynchronmotoren:
„Effizienzsteigerung zwischen 0,6 % (220-kW-Motor) und 8 % (3 kW)“ (WEKA FACHMEDIEN GmbH 2011)
Bauarten
Unterbauformen
Synchron-Reluktanzmotor, Asynchronmotor und Synchronmotor mit Reluktanzmoment, geschaltete Reluktanzmaschine
Betriebs-Charakteristika
| Bauart | Reluktanzmotor |
| Typische Lastprofile | In Abhängigkeit der Regelungsvariante: konstant, taktend, kontinuierlich (Fischer 2006) |
| Maximale Schalthäufigkeiten | Dauerbetrieb (S1-Betrieb) (Fischer 2006) |
| Typische Anfahrzeiten | Mechanische Zeitkonstante (von einigen Millisekunden bis Sekunden je nach Aufbau) (Fischer 2006) |
| Mindestlaufzeiten | k. A. |
| Regelbarkeit | Stufenlos, aber verlustbehaftet (Fischer 2006) |
Energetische Kennwerte
| Bauart | Reluktanzmotor |
| Verfügbare Leistungsklassen | 10 W bis 300 kW
bei 3,15 bis 5,5 m3/min und 8,5 bar Druck |
| Wirkungsgrad in Abhängigkeit der Auslastung | Abhängig vom System |
| Nutzbarer Anteil der Verlustleistung | Vernachlässigbar i. d. R. |
| Energieeffizienzklasse | IE 4, IES2 nach neuer Norm EN 50598
durch Abstimmung auf den Frequenzumrichter (Fischer 2006) |
Wirtschaftliche Kennwerte
| Bauart | Reluktanzmotor |
| Kosten / kWh | Einsparpotenzial gegenüber Asynchronmotoren (Weck; Brecher 2006) |
| € Invest / kW | + Günstig im Vergleich zu Synchronmotoren
– Teurer als Asynchronmotoren (Bauform i. d. R. größer) (Fischer 2006) |
| Platzbedarf / kW | Geringe Drehmomentdichte (Fischer 2006) |
| Wartungs- und Instandhaltungskosten / kWh | Wartungsfrei (Fischer 2006) |
| Typische Lebensdauer / h | siehe Asynchronmotoren |
Technologische Kennwerte
| Bauart | Reluktanzmotor |
| Ökobilanz | + Keine Emissionen, aber Verarbeitung von Kupfer und Eisen, Strom aus erneuerbaren Energien nutzbar |
| Gefährdungspotenzial | – Gering, Überlastschutz vorhanden, niedrige Temperaturen |
| Systemkomplexität | + Robuste Bauweise, einfache Bedienung |
Subjektive Technologie-Portfolio-Analyse
| Technologieattratktivität | Industrielle Umsetzbarkeit | Umsetzbarkeit | Ist es technisch denkbar, diese Technologie zur Bereitstellung von Energieflexibilität einzusetzen? (Grün = Ja, Gelb = Ggf., Rot =Nein) | |
| Komplexität | Wie komplex wäre der Einsatz dieser Technologie zur Bereitstellung von Energieflexibilität? (Grün = einfach, Gelb = eher komplex, Rot = sehr komplex oder nicht möglich) | |||
| Anwendbarkeit bei Industriepartnern | Wäre eine Flexibilisierung solcher Anlagen bei Industriepartnern direkt möglich? (Grün = Ja, Gelb=Nur mit größeren Umbaumaßnahmen, Rot = Nein) | |||
| Einsatzhäufigkeit und Verbreitung | Energetischer Impact | Hat die Technologie typischerweise einen bedeutenden Anteil am Strombedarf eines Fabrikbetriebes? (Grün = Tendenziell ja, Gelb = eher nicht, Rot = Nein (weil z.b. andere Energieträger)) | ||
| Verbreitung in Deutschland | Wie ist der Verbreitungsgrad der Technologie in Deutschland einzuschätzen? (Grün = hoch, Gelb = mittel, Grün = niedrig) | |||
| Umrüstaufwand und Integration | Technology Readiness Level | Wie weit ist die Technologie entwickelt? (Grün = TRL 7-9 Gelb = TRL 4-6, Rot = 1-3) | ||
| Grad der Prozessentkopplung | Wie stark beeinflusst die Anlage in der Regel den Hauptprozess? (Grün = Zwischen der Anlage und dem Hauptprozess befindet sich i.d.R. ein Speicher oder Netz, Gelb = Anlage ist tendentiell nahe am Prozess verbaut, Rot = Anlage hat i.d.R. direkt Einfluss auf den Prozess) | |||
| Möglichkeit des Energieträgerwechsels | Ist ein Energieträgerwechsel möglich? (Grün = Ja in der gleichen Anlage, Gelb = Mit einer zweiten Anlage, Rot = Nein) | |||
| Umrüstaufwand | Wie wird der Aufwand zur Befähigung der Anlage eingeschätzt? (Grün = niedrig, Gelb = mittel, Grün = noch) | |||
| Ressourcenstärke | Übertragbarkeit | Übertragbarkeit | Wie gut lässt sich eine Lösung zur Flexibilisierung dieser Anlage auf andere Anlagen übertragen? (Grün = Technologien sind immer ähnlich aufgebaut, Lösungen sind also übertragbar, Gelb = Keine Aussage möglich, Rot = Sehr Prozessspezifisch bzw. standortspezifisch) | |
| Wirtschaftlichkeit | Erschließungskosten der Maßnahme | Wie hoch sind die spezifischen Investitionshöhen (Grün = niedrig (z.B. nur andere Regelungsart), Gelb = mittel, Rot = hoch (z.B. teure zweite Anlage muss installiert werden) | ||
| Spezifische Wandlerkosten | Wie hoch sind die spezifischen Speicherkosten (Grün = niedrig, Gelb = mittel, Rot = hoch) | |||
| Abrufkosten der Maßnahme | Wie groß ist die Verlustleistung über die Zeit? (Standverluste, Grün = Langzeitspeicher Gelb = Stundenspeicher, Rot = Kurzzeitspeicher) | sehr stark fallabhängig |
Entwicklungstendenz
Für Bereiche mit größerem Bauraum ist eine deutliche Effizienzsteigerung mit Reluktanzmotoren zu beobachten.
Zusammenfassung genereller Vor- und Nachteile
Vorteile
- Preisgünstig
- Wartungsfrei
Nachteile
- Hohe Anlaufströme
- Aufwändige Regelung
- Hohe Drehmomentwelligkeit
Anwendungsbeispiele
Reluktanzmotoren werden zum Teil schon in Pumpen eingesetzt.
Literaturverzeichnis
- Fischer, R. (2006): Elektrische Maschinen. Hanser-Verlag
- Spektrum Akademischer Verlag: Asynchronmotor: Lexikon der Physik. Online Verfügbar, zuletzt geprüft am 30.07.2019
- Spektrum Akademischer Verlag: Induktion: Lexikon der Physik. Online Verfügbar, zuletzt geprüft am 30.07.2019
- Weck, M.; Brecher, C. (2006): Werkzeugmaschinen 3: Mechatronische System, Vorschubantriebe, Prozessdiagnose. Springer-Verlag
- WEKA FACHMEDIEN GmbH (2011) :Renaissance des Reluktanz-Prinzips. Online Verfügbar, zuletzt geprüft am 30.07.2019