

Relevante Energieformen
| Endenergieform | Nutzenergieform | Nebenenergieform(en) |
| Elektrische Energie (Strom) | Mechanische Energie (Rotation) | Thermische Energie (Wärme) |
Kurzbeschreibung
Physikalisches Prinzip: Lorentzkraft bewirkt ein Drehmoment im Asynchronmotor durch abstoßende Magnetfelder.
Motorprinzip: Ein rotierendes äußeres Statormagnetfeld, welches durch einen mehrphasig eingespeisten Drehstrom entsteht, induziert in den Rotorwicklungen ein entgegenwirkendes Magnetfeld. Durch die nichtsynchrone Drehung des Rotors zum rotierenden Magnetfeld entsteht ein Drehmoment.
Funktionsskizze
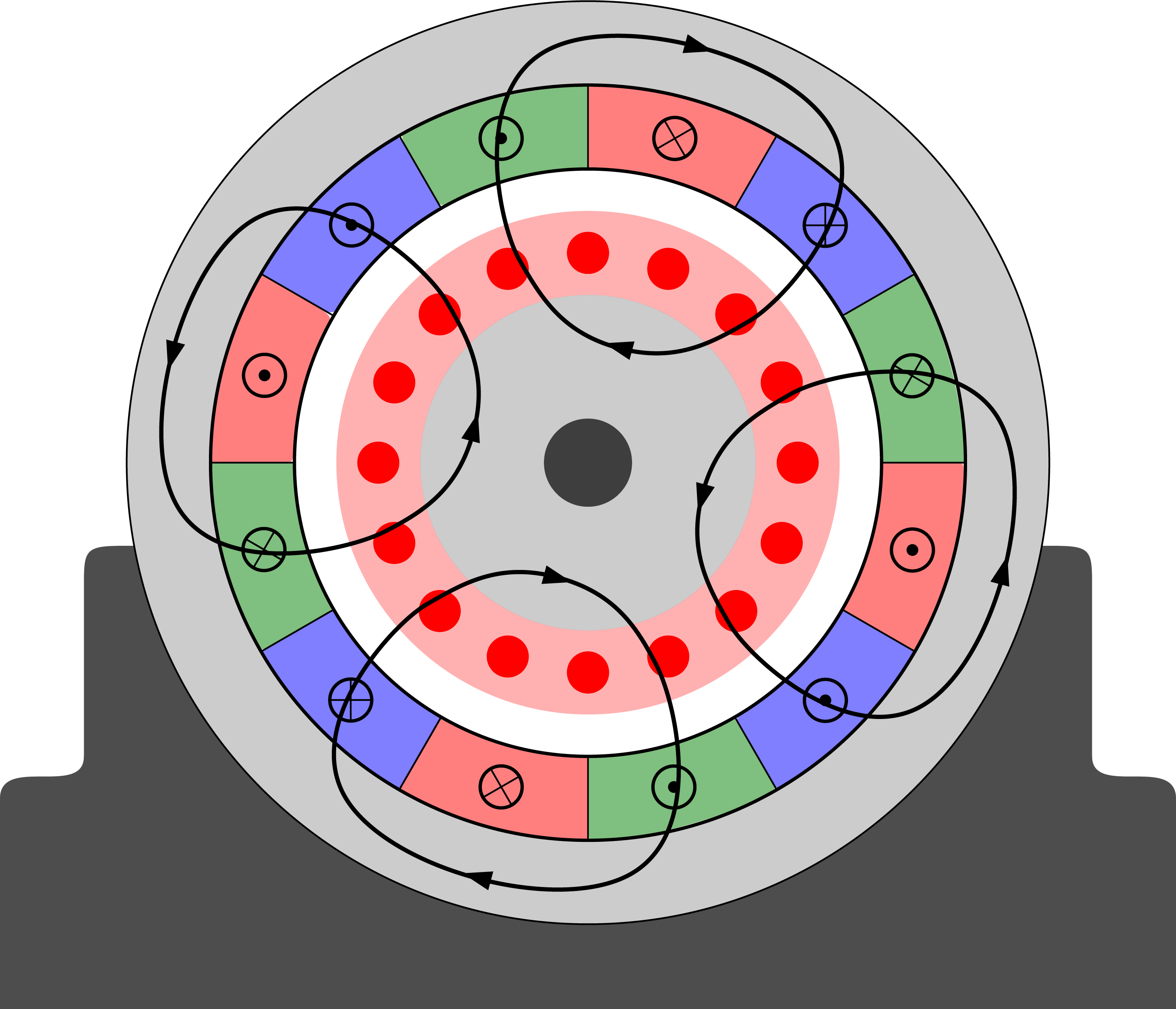
Kurzschlussläufer(Käfigläufer)-Asynchronmotor
Berechnung des Umwandlungswirkungsgrades, typische Werte
Wirkungsgrad im Motorbetrieb:
![\[ \eta = \dfrac{E_\mathrm{mech}}{E_\mathrm{el}} \]](https://technologiematrix.synergie-projekt.de/wp-content/ql-cache/quicklatex.com-6857b9bc811a98648bb3f48aefd6af5e_l3.png "Rendered by QuickLaTeX.com")
Wirkungsgrad im Generatorbetrieb:
![\[ \eta = \dfrac{E_\mathrm{el}}{E_\mathrm{mech}} \]](https://technologiematrix.synergie-projekt.de/wp-content/ql-cache/quicklatex.com-c9f8fbce747da2399b639a57b0618090_l3.png "Rendered by QuickLaTeX.com")
Der Wirkungsgrad ergibt sich aus dem Quotienten der abgegebenen und zugeführten Leistung. Die Differenz ist die Verlustleitung. Die Verlustleistung ergibt sich zum größten Teil aus den Kupferverlusten des Stators für n Phasen mit dem Widerstand R und dem effektiven Phasenstrom Ieff:
![\[ P_\mathrm{vs} = n\ R\ I_\mathrm{eff}^2 \]](https://technologiematrix.synergie-projekt.de/wp-content/ql-cache/quicklatex.com-22341c3bbf027b64f21364a10ef31463_l3.png "Rendered by QuickLaTeX.com")
Die Rotorverluste ergeben sich im equivalenten Ersatzschaltbild aus den quadrierten induzierten Strömen mal dem equivalenten Rotorwiderstand.
![\[ P_\mathrm{vr} = R\ I_\mathrm{rotor, eff}^2 \]](https://technologiematrix.synergie-projekt.de/wp-content/ql-cache/quicklatex.com-dc96f7e789da47a92d17f1abaa6e0966_l3.png "Rendered by QuickLaTeX.com")
Eisenverluste im Stator und Rotor können über die Steinmetzgleichung angenähert werden und sind sehr stark vom Herstellungsverfahren und der Geometrie abhängig.
![\[ P_\mathrm{ve} = k\ B^\alpha\ f^\beta \]](https://technologiematrix.synergie-projekt.de/wp-content/ql-cache/quicklatex.com-f2b8fb189d3f9811021a7d4d2c10a507_l3.png "Rendered by QuickLaTeX.com")
Wirkungsgrad bis zu 50–98 %
(Fischer 2006)
Bauarten
Es gibt eine Vielzahl von Bauformen von Asynchronmotoren.
In Werkzeugmaschinen werden sie typischerweise für die Spindel eingesetzt.
- Kurzschlussläufer (Käfigläufer)
- Schleifringläufer
Betriebs-Charakteristika
| Bauart | Kurzschlussläufer | Schleifringläufer |
| Typisches Lastprofile | In Abhängigkeit der Regelungsvariante: konstant, taktend, kontinuierlich (Fischer 2006) | |
| Maximale Schalthäufigkeiten | Dauerbetrieb (S1-Betrieb) (Fischer 2006) | |
| Typische Anfahrzeiten | Mechanische Zeitkonstante (von einigen Millisekunden bis Sekunden je nach Aufbau) (Fischer 2006) | |
| Regelbarkeit | Stufenlose Regelbarkeit über U/f-Betrieb oder Vektorregelung (Fischer 2006). Die Regelung ist aber deutlich komplizierter als beim Synchronmotor oder Gleichstrommotor, da ein Beobachter für den Fluss ausgelegt werden muss. (Weck 2006) | |
| Drehmomentregelung | Stromregelkreis (i. d. R. über PI-Regler) (Weck 2006) | |
| Drehzahlregelung | Kaskadierter Regelkreis aus Strom und Drehzahl (2 PI-Regler) mit/ohne (Drehzahl-) Geber (Weck 2006) | |
| Lageregelung | Kaskadierter Regelkreis aus Strom, Drehzahl und Lage mit/ohne Winkel- und Positionsgeber. Von einer genauen Positionierung ist auch mit Geber abzusehen. | |
Energetische Kennwerte
| Bauart | Kurzschlussläufer | Schleifringläufer |
| Verfügbare Leistungsklassen | Bei Windkraftanlagen bis in den Megawattbereich | |
| Wirkungsgrad in Abhängigkeit der Auslastung | Siehe Berechnung der Verluste | |
| Nutzbarer Anteil der Verlustleistung | Sehr variabel, da Verlustleistung sehr genau vorhergesagt werden kann. Dieser Anteil kann durch spezielle Ansteuerung erhöht oder vermindert werden. | |
| Verfügbare Energieniveaus | Keine Beschränkung | |
Wirtschaftliche Kennwerte
| Bauart | Kurzschlussläufer | Schleifringläufer |
| € Invest/kW | Eigenschätzung (je nach Größe/Bauform/Stückzahl): ca. 10–500 | |
| Platzbedarf/kW | Abhängig von Anzahl der Pole (Drehmoment-Drehzahl) | |
| Wartungs- und Instandhaltungskosten/kWh | Fast wartungsfrei. Die meisten Wartungskosten verursachen die Lager oder ein evtl. eingebautes Getriebe. | |
| Typische Lebensdauer/h | Keine einheitlichen Werte. Richtwert: 20.000 h. (Nolle 2007) | |
Technologische Kennwerte
| Bauart | Kurzschlussläufer | Schleifringläufer |
| Ökobilanz | Abhängig vom Herstellungsverfahren | |
| Gefährdungspotenzial | Unterschiedlich Mit seltenen Erdenmagneten sehr schlecht, besser: Ferritmagneten oder Fremderregung |
|
| Systemkomplexität | + im Allgemeinen Große Maschinen haben durchaus Gefährungspotential |
|
Entwicklungstendenz
- Im Bereich von Asynchronmaschinen gibt es viel Forschung im Bereich der Regelung, um noch effizienter diesen Motor zu betreiben
- Insbesondere durch den steilen Anstieg der Kosten von Permanentmagneten sind Asynchronmotoren wieder in den Fokus gekommen
Zusammenfassung genereller Vor- und Nachteile
Vorteile
- robuster als Synchronmotoren bei Überlastung
- fast wartungsfrei in vielen Fällen (Ausnahmen i. d. R. wegen mechanischem Verschleiß und Verschmutzung)
- großer Drehzahlbereich
Nachteile
- kleines Startdrehmoment
- aufwändige Regelung
Anwendungsbeispiele
Aufgrund ihrer Robustheit und des guten Preis-Leistungsverhältnisses werden sie in Spindelmotoren, aber auch in Lüfter und Pumpen verschiedener Aggregate verwendet.
Literaturverzeichnis
- Noll, E. (2007): Elektrische Maschinen, Vorlesungsskript
- Fischer, R. (2006): Elektrische Maschinen. Hanser-Verlag
- Weck, M.; Brecher, C. (2006): Werkzeugmaschinen 3: Mechatronische Systeme, Vorschubantriebe, Prozessdiagnose. Springer-Verlag